Telerobotics, Haptics and Computational Vision Laboratory
Our laboratory is located on the first floor of the Information Technology Building Annex (ITBA102). The state-of-the-art equipment in the laboratory supports our research in telerobotics, haptics, medical robotics, and machine vision. The laboratory is host to a number of robotic devices, haptic interfaces, high-performance FPGA boards, real-time computing systems, control and instrumentation equipment, as well as vision systems.
1.0 Mobile Dual-arm Robotic Platform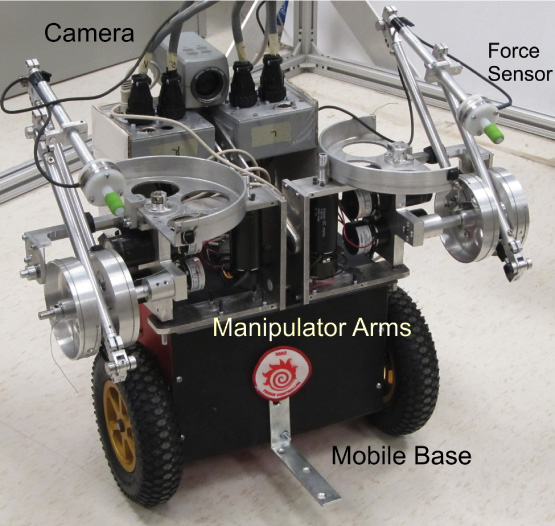
We have developed a mobile dual-arm robotic manipulator for advanced autonomus and telerobotic applications. The system builds on Pioneer P3-DX mobile base. This two-wheel differential drive mobile robot can reach a maximum velocity of 1.6m/s and can carry a payload of up to 23kg. Two custom-built robotic arms are mounted on the base to provide dual-arm manipulation capability. These identical 3DOF robot manipulators have a similar kinematic structure to that of Sensable Phantom, but enjoy a larger workspace and output force. The robot end-effectors are equipped with 6-axis force/torque sensors from ATI Industrial Automation. An on-board camera provides an egocentric view of the robot task-space. The platform is currently employed in our research on asymmetric teleoperation systems.
- Dual-user teleoperation demonstration for a pick and place task: User 1 controls the mobile base while User 2 manipulates the robotic arms.
 |
Back to Top |
2.0 Haptic Interfaces
Haptics is a major thrust of our research which is supported by various high-performance interfaces. The devices can be used either for interaction with virtual environments or in teleoperation settings as master/slave robots.
2.1. Quanser Twin-Pantograph 3DOF Haptic Interface/Robot

This redundantly-actuated parallel device provides three degrees of planar motion/ force feedback (x, y, and unlimited rotation) through integration of two pantograph mechanisms via a linkage bar. Four direct drive DC motors equipped with high resolution optical encoders deliver a continuous output workspace force/torque of 3N /77N.mm and maximum instantaneous force/torque of 10N/ 252N.mm. This equipment can be employed as either a robotic manipulator or a force-feedback haptic interface in teleoperation/haptic simulation settings. By removing a linkage bar, the device can be easily modified to two independent pantograph mechanisms for the use as a double-finger dexterous haptic interface. There are currently two twin-pantograph robots available in our laboratory.

2.2. Phantom 1.5 Premium Haptic Interface
Designed and manufactured by Sensable Technologies, Phantom is widely used by haptics and telerobotics researchers around the world. The interface is cable of six degrees of motion sensing (three translations/three rotations) and three translational degrees of force feedback.
 2.3. Haptics Breadboard
2.3. Haptics Breadboard
Haptics Breadboard is a reconfigurable haptic interface technology comprised of two identical pantograph mechanisms each capable of providing three (3) axes of force feedback and motion sensing. These 3DOF modules can be configured in any desired position/orientation on a base platform as a two-finger interface with adjustable workspace for haptics and teleoperation applications involving grasping. The link lengths in the pantograph mechanisms are also user-adjustable. A passive linkage bar may be used to connect the two robots resulting in a parallel haptic interface with six (6) axes of motion sensing and five (5) axes of force feedback. Haptics Breadboard has been jointly developed by McMaster University and Quanser Consulting Inc.
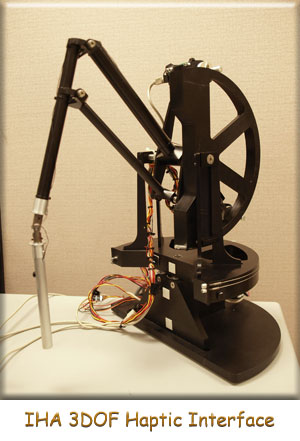
2.4. Integrated Haptic Actuator (IHA) 3DOF Interface
The IHA interface provides 3DOF motion sensing and force feedback and is capable of producing a continuous force of 100N within a large workspace. Built-in joint-level force/torque sensing in this robot allows for a significant reduction in the device inertia and friction making it suitable for applications requiring high-fidelity haptic feedback with large output force. This robot has been developed by Quanser in collaboration with McMaster and Queen’s University.
|
Back to Top |
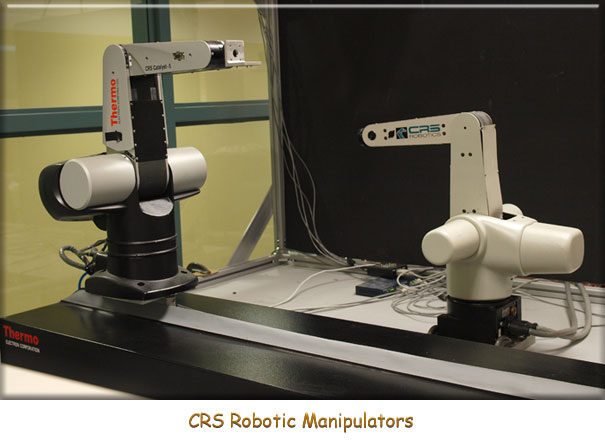
3.0 Multi-axis Robotic Manipulators
A combination of CRS CataLyst5 articulated robotic arm and a 1-meter long linear track has produced a 6DOF high performance robotic manipulator with a considerable workspace. This robot's open control architecture, developed by Quanser, allows for rapid and easy implementation of advanced control algorithms in Matlab/Simulink environment. A second open-architecture CRS A255 with 5DOF is also available in the lab.
|
Back to Top |
4.0 Infrastructure for Real-time Computation and Control
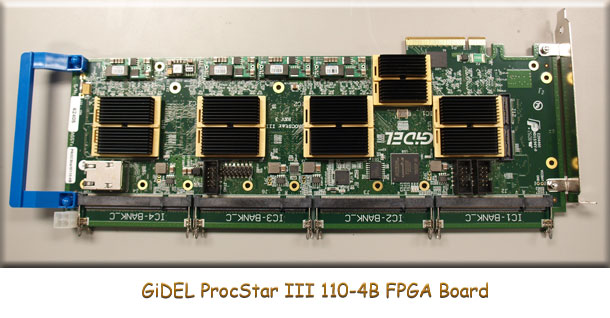
4.1. FPGA Boards
Our research in hardware-based parallel computing for real-time soft-tissue simulation is supported by two state-of-the-art FPGA boards from GiDEL. The PROCStar II board hosts two (2) Stratix II EP2S60 FPGAs from Altera whereas the more powerful PROCStar III board boasts four (4) Stratix III EP3SE110 each with 896 18bit X 18bit multiplier units!
4.2. Real-time Control Software
Rapid development and deployment of real-time control code from within Matlab Simulink environment is made possible by a number of real-time operating system/kernel software suits. These include Quanser’s WinCon/RTX and QuaRC as well as the VxWorks RTOS from WindRiver. These systems allow users to develop hardware-in-the-loop real-time control applications from Simulink environment utilizing many exiting Matlab functionalities as well as user-developed custom code. They also provide easy real-time access to any signal in the system in the Matlab environment.
|
Back to Top |
5.0 Control and Instrumentation Equipment

5.1. Six-axis Force/Torque Sensors
Three (3) Mini40 and two (2) Nano25 six-axis F/T sensors from ATI Industrial Automation are available for the use with the robotic and haptic devices.

5.2. Current-controlled Power Amplifiers
Three (3) QPA high-performance linear power amplifiers from Quanser are employed for the control of the haptic devices.
5.3. Hardware-in-the-loop Data Acquisition Boards
A number of Quanser Q8 and Q4 as well as National Instruments multi-channel I/O boards are used in the instrumentation of the robotic and haptic devices.
|
Back to Top |
6.0 Other Research Equipment

6.1. Active Multi-Camera Vision System
An X-Y gantry servo control system, two PTU-D46-17 pant/tilt units from Directed Perception, two Sony DFW-500L IEEE1394 digital cameras, and a linear multi-cart track constitute an active multi-camera vision system. The X-Y gantry positions the pan/tilt unit above the work-cell along x & y directions. A linear track moves the second pan/tilt unit on the side of work-cell. This configuration provides five position control parameters along with two zoom control variables for the multi-camera vision.
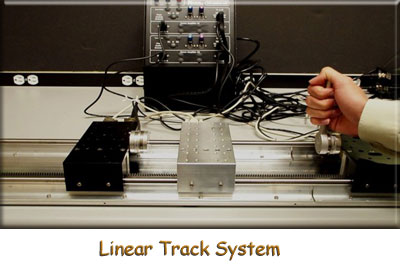
6.2. Linear Multi-cart Track System
The setup consists of two motorized carts and a passive cart all moving on a linear track. The positions of the carts along the track are sensed via optical encoders. The motorized carts can be utilized as master and/or slave robot in single-axis teleoperation experiments.
|
Back to Top |